![]()
![]()
![]() 2.5.
ВИДЕОМОНИТОРЫ
2.5.
ВИДЕОМОНИТОРЫ
Видеомониторы - это устройства, преобразующие видеосигналы в двухмерное изображение. Видеомониторы являются изделиями, специально предназначенными для использования в СОТ (высокая надежность при круглосуточной работе, частом переключении кадров и т. п.), поэтому замена их обычными приемниками телевизионного изображения недопустима. Кроме этого многие видеомониторы снабжены встроенными устройствами для приема сигналов от нескольких камер - видеокоммутаторами. Мониторы делятся на два класса - мониторы черно-белого и мониторы цветного изображения. Основными характеристиками мониторов являются размер экрана по диагонали и разрешение по горизонтали. В СОТ наиболее часто применяются мониторы с размером экрана 9" и 12". При использовании устройств совмещения изображения (квадраторов) применяются, как правило, мониторы с большим размером экрана: 15", 17" или 20". Выбирать монитор по разрешению следует таким образом, чтобы оно была выше, чем у применяемых телевизионных камер - монитор не должен ухудшать общее разрешение системы. При использовании в системе телевизионных камер с обычным разрешением целесообразно выбрать монитор также с обычным разрешением (600-800 ТВЛ для черно-белых и 350-400 -для цветных). В системах высокого класса, как правило, используются мониторы с разрешением 900-1000 ТВЛ (черно-белые) и 450-500 ТВЛ (цветные).
2.6. ОБНАРУЖИТЕЛИ ДВИЖЕНИЙ
Системы охранного телевидения в том виде, в котором большинство пользователей привыкло их понимать (телевизионные камеры и видеомониторы), являются не автоматическими. То есть они не способны сами выдать сигнал тревоги оператору. Таким образом, если в ведении оператора находится большое количество видеомониторов, или если вдруг оператор отвлекся от видеомониторов, с большой вероятностью можно сказать, что тревожная ситуация на охраняемом объекте может быть пропущена. Можно, конечно, осуществить видеозапись событий, но в некоторых случаях важна немедленная оперативная реакция оператора на тревожную ситуацию.
В этом случае на помощь оператору приходят обнаружители движения, поскольку они выдадут охраннику сигнал тревоги при наличии изменений в охраняемой зоне и выведут изображение тревожной зоны на экран видеомонитора, даже если оно в данный момент времени не присутствует ни на одном видеомониторе системы.
Обнаружитель движения (ОД) - это устройство, формирующее сигнал извещения о тревоге при обнаружении изменений, обусловленных движением (появлением) цели на сцене (по ГОСТ Р 51558-2000).
Обнаружитель движения можно представить в виде извещателя охранной сигнализации, датчиком у которого служит телевизионная камера.
Принцип работы обнаружителя движения представлен на рис. 2.8.
Принцип работы обнаружителя движения следующий:
1. В начальный момент времени кадр изображения телевизионной камеры запоминается и становится эталонным кадром (запоминаются параметры кадра телевизионного изображения: средняя яркость по полю изображения, распределение яркости и т.д.);
2. Следующие кадры изображения запоминаются в виде текущих кадров изображения;
3.
При
наличии
существенных
различий
между
эталонным
и
текущим
кадром
изображения,
превышающих
заданную
величину
(порог)
на
выходе
поро
гового
устройства
формируется
сигнал
тревоги;
4. Через определенное время кадр эталонного изображения заменяется на текущий кадр.

![]()
![]() Ниже
приведены
основные
технические
характеристики,
которые
необходимо
знать
пользователю
для
правильного
выбора
и
настройки
обнаружителя
движения
(характеристики
ОД
согласно
ГОСТ
Р
51558-2000
выделены
жирным
курсивом).
Ниже
приведены
основные
технические
характеристики,
которые
необходимо
знать
пользователю
для
правильного
выбора
и
настройки
обнаружителя
движения
(характеристики
ОД
согласно
ГОСТ
Р
51558-2000
выделены
жирным
курсивом).
1. Характеристики видеовходов.
Характеристики видеовходов включают в себя следующие:
-
количество
видеовходов.
Характеристика,
определяющая
количество
контролируемых
видеоканалов;
- стандарт входного видеосигнала (PAL, SECAM, NTSC и др.).
2. Чувствительность обнаружителя движения.
Данная характеристика обнаружителя движения позволяет оператору устанавливать порог срабатывания обнаружителя движения, т.е. те изменения в обстановке охраняемой зоны, при которых обнаружитель движения выдаст сигнал тревоги. Характеристика определяется следующими параметрами:
- минимальный размер обнаруживаемой цели.
Данный параметр определяет, какие минимальные изменения в изображении должны произойти (какого размера объект должен появиться в охраняемой зоне), чтобы обнаружитель движения выдал сигнал тревоги. Например, если обнаружитель движения настроен на порог, соответствующий появлению в охраняемой зоне человека, то он не будет реагировать на появление и перемещение кошки или собаки, но будет реагировать на появление человека или объекта, по размерам больше человека, например, автомобиля.
Также, для устранения ложных срабатываний, существенен вопрос о максимальном размере обнаруживаемой цели. Обычно он не превышает 30 % площади охраняемой зоны.
- минимальный контраст обнаруживаемой цели.
Данный параметр определяет минимальный контраст цели относительно фона при котором обнаружитель движения выдаст сигнал извещения о тревоге. Например, сможет ли обнаружитель среагировать на появление человека в белом маскировочном халате на фоне белой стены или снега?
- диапазон скоростей перемещения обнаруживаемой цели.
Как и в случае применения охранных извещателей необходимо ограничить диапазон скоростей движения цели как сверху (максимальная скорость), так и снизу (минимальная скорость). Данные ограничения позволяют повысить помехоустойчивость обнаружителя движения за счет того, что исключаются нереальные для цели скорости перемещения. Например, для обнаружения человека достаточен диапазон от 0.3 до 3 м/с.
3. Количество, размер и форма зон обнаружения.
В многозонных ОД охраняемая зона, контролируемая одной телевизионной камерой, разделяется несколько зон по вертикали и горизонтали, обработка видеосигнала в которых ведется независимо. Это позволяет пользователю гибко настраивать ОД под конкретную охраняемую зону на объекте: минимизировать количество ложных срабатываний путем исключения из анализа тех частей охраняемой зоны, проникновение из которых на охраняемый объект маловероятно.
4. Полоса частот.
Данная характеристика обнаружителя движения, в конечном итоге, влияет на разрешение системы в целом.
5. Количество, тип и параметры выходных сигналов тревоги:
- количество выходных сигналов тревоги;
-
тип
выходных
сигналов
тревоги
(индивидуальные
выходы
для
каждого
канала,
общий
выход;
релейный
выход,
звуковой
выход,
визуальный
выход
-
обозначение
тревожной
зоны
на
экране)
-
максимальное
напряжение
и
максимальный
коммутируемый
ток
выход
ного
сигнала
тревоги
6. Климатические характеристики:
- диапазон рабочих температур;
- диапазон температур хранения;
- относительная влажность.
7. Механические характеристики:
- габаритные размеры;
- масса;
- возможность монтажа в стойку.
Большинство современных обнаружителей движения имеют также ряд дополнительных функций, позволяющих гибко настраивать его под условия конкретного охраняемого объекта.
Большинство пользователей считают, что чем ОД сложнее, тем лучше. Однако всё не так просто. Для сложных условий работы ОД должны иметь очень сложный алгоритм обнаружения движения вплоть до средств распознавания целей, и, соответственно, множество параметров настройки, желательно с автоматической подстройкой (самообучающиеся).
![]()
![]()
![]() Большинство
ОД
работают
просто:
есть
критерии
движения
- это
тревога.
Есть
критерии
ложной
тревоги
(движение
более
чем
на
30%
экрана,
слишком
быстрое,
изменение
освещённости
по
всему
полю
экрана,
и
т.д.).
Как
правило,
если
принимается
решение,
что
есть
признаки
ложной
тревоги
(точнее,
есть
факторы
мешающие
нормальной
работе),
то
просто
блокируется
выдача
сигнала
тревоги.
Соответственно,
способ
преодоления
-
наделать
как
можно
больше
шуму:
быстро
бежать
прямо
на
камеру,
разбрасывая
вокруг
фальшивые
цели.
В
такой
ситуации
обнаружитель
движения,
скорее
всего
не
выдаст
сигнала
тревоги.
Большинство
ОД
работают
просто:
есть
критерии
движения
- это
тревога.
Есть
критерии
ложной
тревоги
(движение
более
чем
на
30%
экрана,
слишком
быстрое,
изменение
освещённости
по
всему
полю
экрана,
и
т.д.).
Как
правило,
если
принимается
решение,
что
есть
признаки
ложной
тревоги
(точнее,
есть
факторы
мешающие
нормальной
работе),
то
просто
блокируется
выдача
сигнала
тревоги.
Соответственно,
способ
преодоления
-
наделать
как
можно
больше
шуму:
быстро
бежать
прямо
на
камеру,
разбрасывая
вокруг
фальшивые
цели.
В
такой
ситуации
обнаружитель
движения,
скорее
всего
не
выдаст
сигнала
тревоги.
Естественно, что даже самообучающиеся системы требуют управления. Чем больше параметров настройки, тем тщательнее надо управлять. Как минимум, менять режимы работы день/ночь и зима/лето (это обычно могут ОД делать сами), а чтобы тонкая настройка действительно приводила к успеху, то и более часто: кучевая облачность - одна настройка, перистая - другая, ну и так далее. То есть для сложной системы нужен очень профессиональный оператор.
Основной параметр - соотношение количества ложных тревог и вероятности обнаружения проникновения - индивидуален для каждого конкретного объекта и зависят от условий работы системы на объекте (сцены поля зрения). Если есть возможность обеспечить вспаханную полосу отчуждения, то годится дешёвый ОД с простым алгоритмом. Однако сама полоса отчуждения стоит немалых денег.
Практика показывает, что практически от любого ОД можно получить достаточно хорошие результаты, если визуальную обстановку на объекте подогнать под заложенные в него алгоритмы регистрации движения. Поэтому важно не только правильно выбрать обнаружитель движения именно для Вашего объекта и правильно его настроить, но и по возможности устранить причины ложных срабатываний ОД.
При настройке ОД, прежде всего, следует ограничить число контролируемых зон: не более 2-3 на одну телевизионную камеру - чтобы не работать с мелкими объектами, как правило, обладающих низким контрастом. Далее, выбрать положение ТВК и ее угол зрения таким образом, чтобы размеры предполагаемой цели (нарушителя) были больше минимального размера обнаруживаемой цели. Кроме того, желательно, чтобы предполагаемое перемещение цели происходило преимущественно перпендикулярно направлению линии визирования телевизионной камеры.
Настройку ОД лучше всего производить на полунатурном моделировании, то есть на уже смонтированной ТВК. Для начала определяется чувствительность, при которой ОД выдает сигнал тревоги от флюктуационных движений фона. Затем в охраняемую зону вводится предполагаемая цель (человек, машина и др.) и фиксируется минимальная чувствительность ее обнаружения. Окончательную чувствительность ОД рекомендуется установить ниже (грубее) чувствительности к флюктуациям фона на 1/3 интервала между минимальными величинами чувствительности ОД к цели и флюктуациям фона. Такой выбор порога обнаружения цели минимизирует количество ложных тревог и пропусков цели.
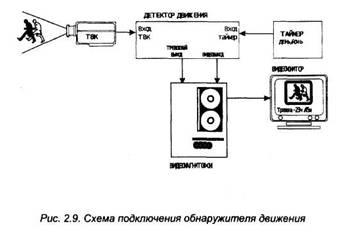
Схема подключения обнаружителя движения приведена на рис. 2.9.